Elektronik dönüş sayacı. Bellek ters dönüş sayacı - Bitmiş cihazlar - Makale kataloğu - Mikrodenetleyiciler - çok kolay! İmalat için gerekli malzeme ve ekipmanlar
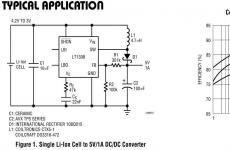
Dergide yayınlanan çeşitli amaçlar için bir dizi sayaç tasarımına aşina olduktan sonra (örneğin), mikrodenetleyicinin kalıcı hafızasını kullanan kendi dönüş sayacı versiyonumu geliştirmeye karar verdim. Sonuç olarak, kıt parça içermeyen bir sarım makinesi için basit ve kullanımı kolay bir bobin sayacı oluşturmak mümkün oldu.
Pirinç. 1
Sayaç birkaç düğümden oluşur ( pirinç. 1). Tasarım, akım sınırlayıcı dirençler R10-R16 aracılığıyla dört basamaklı bir HG1 LED göstergesinin bağlandığı DD1 mikrodenetleyicisine dayanmaktadır. İki optokuplör - bir IR yayan diyot-fototransistör (VD2VT1, VD3VT2) - makinenin çalışma milinin bir hız sensörünü oluşturur, mikro denetleyicinin dönme yönünü ve mil devir sayısını belirlediği düşük seviyeli darbeler oluşturur. Belleği ve yardımcı devreleri sıfırlamak için bir SB1 düğmesi vardır: mikro denetleyicinin yerleşik saat üretecinin bir parçası olarak çalışan R2C2, mikro denetleyiciyi UYKU moduna geçirmek için gerekli besleme voltajını depolayan VD1C1 ve Sayaç besleme voltajını izleyen R6R8.
PIC ailesinin mikrodenetleyicilerinin EEPROM ile çalışırken (özellikle ona yazma otomatik olarak gerçekleştiğinde) oldukça kaprisli olduğu bilinmektedir. Besleme geriliminin düşürülmesi bellek içeriğini bozabilir Sayaç çalışırken R6R8 devresinin bağlı olduğu mikrodenetleyicinin RB1 hattı (pin 7) besleme gerilimi var mı yok mu diye sorgulanır. , ardından VD1C1 devresi sayesinde mikrodenetleyici uyku moduna geçmeyi başarır, böylece daha fazla program yürütülmesini engeller ve EEPROM'daki bilgileri korur. Sayma sürecinde, mikrodenetleyici, makinenin çalışma milinin her dönüşünden sonra sayıları hafızasında saklayacaktır. Güç her açıldığında, HG1 göstergesi güç kapatılmadan önceki sayıyı gösterecektir.
Sensör, üzerine iki yayan diyot ve iki fototransistörün monte edildiği, iki optik verici-alıcı kanalı oluşturacak şekilde monte edilmiş küçük bir baskılı devre kartıdır (22×22 mm). Kanalların optik eksenleri paraleldir, merkez mesafesi yaklaşık 10 mm'dir.
Makinenin çalışma miline, IR ışınları için opak (textolite, getinax, metal, plastik) 1 ... 2 mm kalınlığında sert bir malzemeden yapılmış bir disk şeklinde bir kapak sabitlenmiştir. Panjur çapı 35…50 mm'dir, merkezi montaj deliğinin çapı mil çapına eşittir. Tahta makineye sabitlenmiştir, böylece mil ile birlikte dönen kapak her iki IR ışınını da engelleyebilir.
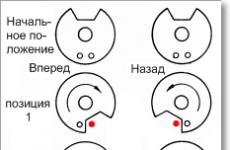
Perdede tamamlanmamış bir sektör şeklinde bir kesik kesilir. Çentiğin açısal genişliği ve derinliği, şaft döndüğünde, kapak, şematik olarak gösterildiği gibi, önce yalnızca bir kanaldan, sonra her ikisinden ve son olarak yalnızca diğerinden kısa süreli bir IR radyasyon geçişi sağlayacak şekilde olmalıdır. Şek. pirinç. 2. Şu veya bu konumda açık olan kanallar renkli olarak gösterilir. Sensörden gelen bu sinyal dizisi, mikrodenetleyiciye makinenin çalışma milinin dönüş yönünü belirleme yeteneği verir.

Sayaç, üç adet AA (R6) galvanik pilden oluşan bir pille çalışır, ancak 5 V'luk stabilize çıkış voltajına sahip herhangi bir ağ ünitesini kullanabilirsiniz.
"Yüzey" dirençler yerine 0,062 W gücünde MLT-0,125 veya C2-23 kullanabilirsiniz. Düğme SB1 - tahtaya montaj için uygun herhangi biri. E40281-L-O-0-W yerine FYQ-2841CLR dijital gösterge iş görecektir.
Mikrodenetleyici programı Proteus ortamında geliştirildi ve hata ayıklandı, ardından ICProg programlayıcı kullanılarak mikrodenetleyiciye yüklendi. Mikrodenetleyici panoya takıldıktan sonra, sayacın ilk ve sonraki açılışında gösterge tüm tanıdık alanlarda eksi işareti gösterecektir. Yaklaşık iki saniye sonra ekranda sıfırlar görünecektir - bu, sayacın çalışmaya hazır olduğunun bir işaretidir.
Program, hatalı bilgi alması ve mikrodenetleyicinin "donması" durumunda acil durum belleği sıfırlama işlevi sağlar (bu çok nadiren olur, ancak olabilir). Mikrodenetleyiciyi çalışma moduna döndürmek için sayaç gücünü kapatmanız, "Sıfırla" düğmesine basmanız ve bırakmadan gücü açmanız gerekir. Puan tablosu sıfırları gösterir göstermez çalışmaya devam edebilirsiniz, ancak önceki dönüş sayısı hakkındaki bilgiler elbette kaybolacaktır.
Düzgün monte edilmiş bir cihazın ayarlanmasına gerek yoktur.
EDEBİYAT
1. Uzun A. Geliştirilmiş tersine çevrilebilir sayaç. - Radyo, 2005, Sayı 11, s. 28, 29.
2. Gasanov A., Gasanov R. Elektronik sayaç. - Radyo. 2006, sayı 11, s. 35, 36.
A. BANKOV, Orel (Radyo, Sayı 8 2011)
Öyle oldu ki, transformatörü sarmak beni yaktı, her şey yoluna girecek, ancak makine yeterli değil - oradan başladı! Bir İnternet araması bazı olası inşaat seçenekleri verdi, ancak dönüşlerin sayılmasının yine bir hız göstergesinden veya eski bir kayıt cihazından veya bir kamış anahtarı + hesap makinesinden çıkarılan mekanik bir sayaç tarafından yapılması kafamı karıştırdı. Hmm...
Mekanikte, sayaç açısından kesinlikle sahip değildim, sökmek için hız ölçerim yok, fazladan hesap makinem de yok. Evet ve Yoldaş'ın dediği gibi. Serega başka bir kaynaktan: "İyi elektronik mühendisleri, genellikle kötü mekanik!". En iyi elektronik mühendisi olmayabilirim - ama tamirci kesinlikle berbat.
Bu nedenle, bir elektronik sayacı bozmaya ve cihazın tüm mekanik kısmını ailenin gelişimine emanet etmeye karar verdim (neyse ki, babam ve erkek kardeşim mekanik açısından sadece aslar). Bir yeri diğeri için tahmin ettikten sonra, 4 haneli göstergenin benim için yeterli olacağına karar verdim - bu çok değil - biraz değil, 10.000 dönüş. Denetleyici tüm rezaleti yönetecek, yalnızca en sevdiğim ATtiny2313 ve ATmega8 bana bu kadar önemsiz bir cihaza sokmak için tamamen uygunsuz göründü, görev basit ve sadece çözmeniz gerekiyor. Bu nedenle, bugün satışta olanların muhtemelen en "ölü" MK'si olan ATtiny13'ü kullanacağız (PIC veya MCS-51 almıyorum - bunları yalnızca programlayabilirim, ancak nasıl program yazacağımı bilmiyorum. onlara). Bu tenekenin yeterli bacağı yok, bu yüzden kimse vardiya kayıtlarını ona takmamız için bizi rahatsız etmiyor! Hız sensörü olarak bir hall sensörü kullanmaya karar verdim.
Bir diyagram çizdi:
ve bir breadboard üzerinde toplandı:

Düğmeler hakkında hemen söylemedim - ama onlarsız nerede olurduk! Sıfırlamaya (S1) ek olarak 4 adete kadar.
S2 - sarma modunu açar (mod varsayılan olarak ayarlanmıştır) - eksenin bobinle her dönüşünde, dönüş sayısının değerini 1 artırır
S3 - sırasıyla sarma modu, her dönüşte değeri 1 azaltır. Mümkün olduğu kadar "0" a kadar sarabilirsiniz - eksiye kadar sarmaz :)
S4 - EEPROM'da saklanan bilgileri okuma.
S5 - EEPROM akım değeri + moduna yaz.
Doğal olarak dönüşleri saracaksak sarım butonuna basmayı unutmamalıyız yoksa eklenecektir. 1 hall sensörü - 3 adet veya bir valcoder yerine asmak ve kontrolör programını dönüş yönünü seçecek şekilde değiştirmek mümkündü ama bu durumda bunun gereksiz olduğunu düşünüyorum.
Şimdi şemaya göre pek değil:
Gördüğünüz gibi, içinde doğaüstü hiçbir şey yok. Tüm bu rezalet 5V tarafından desteklenmektedir. Akım 85mA civarında bir şey tüketir.
Hariç tutulan parça. Dergimiz okuyucu bağışlarıyla varlığını sürdürmektedir. Bu makalenin tam sürümü yalnızca mevcuttur
Düğmeler S2-S4 - la matrix klavye. Düğmelerin "çıkışları", kayıt girişleriyle aynı iletkenlere asılır, gerçek şu ki, kontrolörden kayıtlara veri aktardıktan sonra, SHcp ve Ds girişlerinde herhangi bir seviyede bir sinyal olabilir ve bu olmaz kayıtların içeriğini etkiler. Düğmelerin "girişleri", kayıtların çıkışlarında asılı kalır, bilgi aktarımı yaklaşık olarak şu şekilde gerçekleşir: önce, kontrolör, daha sonra göstergelere aktarım için kayıtlara bilgi gönderir, ardından düğmeleri taramak için bilgi gönderir. Kayıtların / denetleyicinin ayakları arasında bir "kavgayı" önlemek için R14-R15 dirençlerine ihtiyaç vardır. Bilgiler göstergeye ve klavye taramasına yüksek frekansta gönderilir (tini13'teki dahili jeneratör 9,6 MHz'e ayarlıdır), düğmeye ne kadar hızlı basıp bırakmaya çalışırsak çalışalım, ve tuşlarına basarken birçok işlem gerçekleşir. , buna göre düğmeden gelen sıfır, denetleyiciden toplantı birliğine doğru çalışacaktır. Düğme kontaklarının tekrar sıçraması gibi hoş olmayan bir şey.
R16-R17 dirençleri ile klavyemizi + güç kaynağına çekiyoruz, böylece boşta kalma süresinde klavye çıkışlarından controller girişlerine Z durumu yerine bir birlik geliyor bu da yanlış pozitiflere yol açıyor. Bu dirençler olmadan yapmak mümkündü, MK'deki dahili çekme dirençleri oldukça yeterli ama evet, elim onları kaldırmak için kalkmadı - Tanrı kasayı kurtarıyor.
Şemaya göre hepsi bu gibi görünüyor, ilgilenenler için bileşenlerin bir listesini veriyorum. Derhal, mezheplerin bir yönde veya başka bir yönde farklılık gösterebileceği konusunda bir rezervasyon yapın.
Hariç tutulan parça. Dergimiz okuyucu bağışlarıyla varlığını sürdürmektedir. Bu makalenin tam sürümü yalnızca mevcuttur
Düzen üzerinde tezgahın çalışmasını kontrol ettikten sonra, sıra demir parçasını “bitmiş bir cihaza” monte etme zamanıdır. Tahtayı yaydım, kazıdım, parçaları lehimledim ve aşağıdakileri elde ettim:


Bitmiş versiyonda sıfırlama düğmesi yok - tahtaya yapıştıracak hiçbir yerim yoktu, bu yüzden yeterli alan yok ve MK donarsa, o zaman enerjisini kesip tekrar açacağım. Güç devresinde de bir diyot belirdi - kutupların tersine çevrilmesine karşı koruma. Ayrıntıların geri kalanına gelince, sadece eldekileri kullandım, işte SMD ve sıradan vakalar.
Hepsi bu kadar, makalenin sonunda ürün yazılımı diyagramı / mührü olan bir arşiv var.
Bu arada, bellenim hakkında, kart yerden tasarruf etmek için programlama için bir konektör sağlamaz. Bunun gibi SPI protokolünü kullanarak flaş yaptım:

Programcıları, HVProg, AVR910 ve USBAsp'ı denedim - hepsi denetleyiciyi sorunsuz bir şekilde flaşladı. Ürün yazılımından sonra, ilk değerleri EEPROM'a yazmak için yazma düğmesine basmak mantıklıdır. Bu yapılmazsa, ancak okuma tuşuna basılırsa, göstergelerde her şeyi görebiliriz - daha önce hafızada ne olduğunu kim bilebilir?
Son sonuç:
Sensörü makinenin sabit kısmına sabitliyoruz, mıknatısı dönüş sırasında sensörden 3-5 mm geçecek şekilde dönme eksenine yerleştiriyoruz. Peki kullanalım :)
Şimdi her şey kesin, ilginiz için hepinize teşekkür ederim ve yoldaşlar GP1 Ve gerçeküstü geliştirmede yardım için eleştiri bekliyoruz :)
Dosyalar
Şema, mühür, bellenim:▼ 🕗 10/02/10 ⚖️ 128.55 Kb ⇣ 354 Merhaba okuyucu! Benim adım Igor, 45 yaşındayım, Sibiryalıyım ve hevesli bir amatör elektronik mühendisiyim. 2006'dan beri bu harika siteyi buldum, oluşturdum ve sürdürüyorum.
10 yıldan fazla bir süredir dergimiz sadece benim pahasına var.
İyi! Bedava bitti. Dosyalar ve yararlı makaleler istiyorsanız - bana yardım edin!
--
İlginiz için teşekkür ederiz!
Datagor dergisinin genel yayın yönetmeni Igor Kotov
Donanım yazılımı kaynakları:
▼
🕗 04/03/10 ⚖️ 3.62 Kb ⇣ 254
Amatör radyo pratiğinde, genellikle çeşitli transformatör, bobin, röle vb. sargılarını sarmak / geri sarmak gerekli hale gelir.
Bu makineyi geliştirirken aşağıdaki görevler belirlendi:
1. Küçük boyutlar.
2. Milin yumuşak başlangıcı.
3. 10000 dönüşe kadar sayaç (9999).
4. Otomatik tel döşeme ile sarım. Döşeme adımı (tel çapı) 0,02 - 0,4 mm.
5. Kesit sargılarını yeniden yapılandırma olmadan sarma imkanı.
6. Çerçeveleri merkezi bir delik olmadan sabitleme ve sarma imkanı.
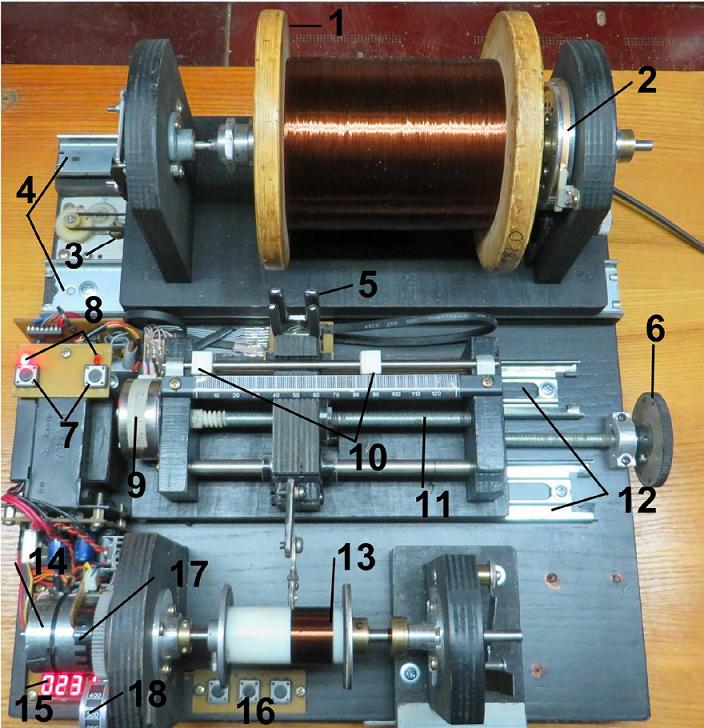
Resim 1.
Sarım makinesinin dış görünümü.
Sarma makinesinin bileşimi.
1. Besleme makarası (telli makara).
2. Frenleme (frenleme mekanizması).
3. Bobin hizalama için kademeli motor.
4. Top mobilya kılavuzları.
5. Bobin merkezleme mekanizmasının optik sensörleri için kapak.
6. Kısmi sargıları sararken konumlandırıcıyı başka bir kısma taşımak için kulp.
7. Asfaltlama yönünü manuel olarak değiştirmek için düğmeler.
8. Döşeme yönü LED'leri.
9. Kademeli motor konumlandırıcı.
10. Sarım sınırının optik sensörleri için kapaklar.
11. Konumlandırıcı vidası.
12. Top mobilya kılavuzları.
13. Sarılabilir bobin.
14. Sargı motoru.
15. Sayacı çevirin.
16. Ayarlar düğmeleri.
17. Optik senkronizasyon sensörü.
18. Hız kontrolörü.
Cihaz ve çalışma prensibi.
Teslimat düğümü.
Besleme ünitesi, üzerinde çeşitli ebatlarda tel bulunan bir makarayı sabitlemek ve telin gerginliğini sağlamak için tasarlanmıştır.
Bir bobin takma mekanizması ve bir mil frenleme mekanizması içerir.

Şekil 2.
Teslimat düğümü.
Frenleme.
Besleme makarası yavaşlatılmadan, çerçevelerdeki telin sarımı gevşek olacak ve yüksek kaliteli sarım çalışmayacaktır. Keçe bant "2", tamburu "1" frenler. Kolu "3" çevirmek, "4" yayı gerer - fren kuvvetinin ayarlanması. Farklı tel kalınlıkları için kendi frenlemesi yapılandırılmıştır. Burada bir VCR'ın hazır parçaları kullanılmaktadır.

Figür 3
Fren mekanizması.
Bobin merkezleme.
Makinenin küçük boyutları ve sarım makarasının ve telli besleme makarasının hemen yakınındaki konumu, tedarik makarasını merkezlemek için ek bir mekanizmanın kullanılmasını gerektirdi.


Şekil 4, 5.
merkezleme mekanizması
Bobini sararken, bobinden gelen tel, 6 bölmeli bir dişli kutusu ve dişli bir kayış aracılığıyla "çatal" şeklinde yapılmış "5" kapağına ve "3" kademeli motora etki eder. makara kılavuzları "4", bobini otomatik olarak doğru yöne kaydırır.
Böylece tel her zaman merkezdedir, bkz. şekil 4, şekil 5:

Şekil 6
Sensörler, arka görüş.
Sensörlerin bileşimi ve düzenlenmesi.
19. Bobin merkezleme mekanizmasının optik sensörleri.
5. Bobin merkezleme mekanizmasının sensörlerini örten kapak.
20. Pozisyonerin yönünü değiştirmek için örtüşen perde sensörleri.
21. Konumlandırıcının yönünü değiştirmek için optik sensörler.
Pozisyoner.
Perdeler "20" şek. 6 - sarma sınırı ayarlanır. Kademeli motor, kapak "21" sensörlerinden birini kapatana kadar istifleme mekanizmasını hareket ettirir (şek. 6, bundan sonra döşeme yönü değişir.
İstediğiniz zaman "1" şek. 7.

Şekil 7
istifleyici.
Adım motorunun dönüş hızı "9" şek. 7, sensör "10", "11" (şekil 8) ile senkronize, sarılan bobinin dönüşü ile ve menüde ayarlanan telin çapına bağlıdır. Tel çapı 0,02 - 0,4 mm olarak ayarlanabilir. "8" kolu vasıtasıyla şek. 7'de, sarma sınırını değiştirmeden tüm konumlandırıcıyı yana hareket ettirebilirsiniz. Böylece çok kesitli çerçevelerde başka bir bölümü sarmak mümkündür.

Şekil 8
Optosensör.
Pozisyoner ve opto-sensörün bileşimi (Şekil 7-8).
1. Asfaltlama yönünü manuel olarak değiştirmek için düğmeler.
2. Döşeme yönü LED'leri.
3. Pozisyonerin yönünü değiştirmek için örtüşen perde sensörleri.
4. Doğrusal yatak.
5. Kaprolon somunu.
6. Kılavuz vida. Çap 8 mm, diş adımı 1,25 mm.
7. Top mobilya kılavuzları.
8. Kısmi sargıları sararken konumlayıcıyı başka bir kısma taşımak için kulp.
9. Adım motoru.
10. Optik senkronizasyon sensörü.
11. Zamanlama sensörünü kaplayan disk. 18 yuva.
alıcı düğüm

Şekil 9
alıcı düğüm


Şekil 10, 11.
alıcı düğüm
1. Sayacı çevirin.
2. Toplayıcı yüksek hızlı motor.
3. Dişli redüktör.
4. "Sayacı sıfırlama" düğmesi.
5. Hız ayarı.
6. "Sarmayı başlat"ı değiştirin.
7. Sarılmakta olan bobin için bağlantı elemanları.
Sarılmakta olan bobinin dönüşü, bir vites kutusu aracılığıyla bir komütatör yüksek hızlı motor üretir.
Şanzıman, ortak bölümü 18 olan üç vitesten oluşur. Bu, düşük hızlarda gerekli torku sağlar.
Motor hızı, besleme voltajı değiştirilerek kontrol edilir.


Şekil 12, 13.
Delikli bir çerçeve montajı.
Alıcı ünitesinin tasarımı, şekillerde açıkça görüldüğü gibi, hem merkezi bir delik bulunan çerçeveleri hem de bu deliklere sahip olmayan çerçeveleri sabitlemenizi sağlar.

Şekil 14, 15.
Çerçeveyi deliksiz sabitleme.
Elektrik devresi.

Şekil 16.
Sarma makinesinin elektrik devresi.
Tüm makine işlemleri PIC16F877 mikrodenetleyici tarafından kontrol edilir.
Sarım sayısı ve tel çapı göstergesi dört basamaklı LED göstergesinde görüntülenir. "D" butonuna basıldığında telin çapı, sarım sayısına basıldığında ekrana gelir.
Telin çapını değiştirmek için "D" tuşuna basın ve "+", "-" tuşlarını kullanarak değeri değiştirin. Ayarlanan değer otomatik olarak EEPROM'da saklanır. Düğme "Sıfır" - sayacı sıfırlama. ISCP konektörü, mikrodenetleyiciyi programlamak için kullanılır.
Not: Cihaz tek kopya halinde yapıldığından ve tasarım montaj sürecinde oluştuğundan mekanik parçanın çizimleri yoktur.
Bu tasarımda VCR ve yazıcılardan demontajda (etiketlenmemiş) bulunan elemanlar ve montajlar kullanılmıştır.
Hiçbir durumda bu tasarımın tam olarak tekrarlanmasında ısrar etmiyorum, sadece tasarımlarımda ondan herhangi bir düğüm kullanmakta ısrar ediyorum.
Bu cihazın tekrarı, mekanik ile çalışma becerisine sahip ve mevcut mekanik parçalarına uyacak şekilde tasarımı değiştirebilen deneyimli radyo amatörleri tarafından mümkündür.
Mekanik kısım sırasıyla farklı şekilde uygulanabilir.
Motorlardaki dişli kutuları farklı bir bölüme sahip olabilir.
Kritik unsurlar:
Programın doğru çalışabilmesi için bir takım şartların yerine getirilmesi gerekmektedir;
Optik sensör "17" Şekil 1., farklı bir tasarıma sahip olabilir, ancak 18 delik için zorunludur.
Konumlandırıcı vida, her zaman 1,25 mm'lik bir hatve ile - bu, 8 mm çapındaki bir vida için standart hatvedir.
Pozisyoner kademeli motor 48 adım/devir, 7,5 derece/adım, ofis ekipmanlarında en yaygın motorlardır.
Makinenin tanıtım videosu:
Aşağıdaki ekte (arşivde), sarım makinesinin montajı için gerekli tüm dosyalar ve malzemeler toplanmıştır.
Birinin montaj ve devreye alma hakkında herhangi bir sorusu varsa, onlara forumda sorun. Cevaplamaya ve mümkün olduğunca yardımcı olmaya çalışacağım.
Hepinize çalışmalarınızda başarılar ve en iyi dileklerimle!
Arşiv "sarma makinesi."
Dergide yayınlanan çeşitli amaçlar için bir dizi sayaç tasarımına aşina olduktan sonra (örneğin), mikrodenetleyicinin kalıcı hafızasını kullanan kendi dönüş sayacı versiyonumu geliştirmeye karar verdim. Sonuç olarak, kıt parça içermeyen bir sarım makinesi için basit ve kullanımı kolay bir bobin sayacı oluşturmak mümkün oldu.
0 ila 9999 mil devri arasında sayabilir, bundan sonra gösterge okumaları sıfırlanır ve sayma yeniden başlar. Mil ters yönde döndüğünde, gösterge her devirde bir azalır.
Pirinç. 1
Sayaç birkaç düğümden oluşur (Şekil 1). Tasarım, akım sınırlayıcı dirençler R10-R16 aracılığıyla dört basamaklı bir LED gösterge HG1'in bağlandığı DD1 mikrodenetleyicisine dayanmaktadır. İki optokuplör - bir IR yayan diyot - bir fototransistör (VD2VT1, VD3VT2), - makinenin çalışma milinin bir hız sensörünü oluşturur, mikrodenetleyicinin dönme yönünü ve mil devir sayısını belirlediği düşük seviyeli darbeler oluşturur . Belleği ve yardımcı devreleri sıfırlamak için bir SB1 düğmesi vardır: mikro denetleyicinin yerleşik saat üretecinin bir parçası olarak çalışan R2C2, mikro denetleyiciyi UYKU moduna geçirmek için gerekli besleme voltajını depolayan VD1C1 ve Sayaç besleme voltajını izleyen R6R8.

PIC ailesinin mikrodenetleyicilerinin EEPROM ile çalışırken (özellikle ona yazma otomatik olarak gerçekleştiğinde) oldukça kaprisli olduğu bilinmektedir. Besleme geriliminin düşürülmesi bellek içeriğini bozabilir Sayaç çalışırken R6R8 devresinin bağlı olduğu mikrodenetleyicinin RB1 hattı (pin 7) besleme gerilimi var mı yok mu diye sorgulanır. , ardından VD1C1 devresi sayesinde mikrodenetleyici uyku moduna geçmeyi başarır, böylece daha fazla program yürütülmesini engeller ve EEPROM'daki bilgileri korur. Sayma sürecinde, mikrodenetleyici, makinenin çalışma milinin her dönüşünden sonra sayıları hafızasında saklayacaktır. Güç her açıldığında, HG1 göstergesi güç kapatılmadan önceki sayıyı gösterecektir.
Sensör, üzerine iki optik verici-alıcı kanalı oluşturacak şekilde monte edilmiş iki yayan diyotun ve iki fototransistörün monte edildiği küçük bir baskılı devre kartıdır (22x22 mm). Kanalların optik eksenleri paraleldir, merkez mesafesi yaklaşık 10 mm'dir.
Makinenin çalışma miline, 1 ... 2 mm kalınlığında IR ışınları (tekstolit, getinaks, metal, plastik) için opak sert bir malzemeden yapılmış bir disk şeklinde bir kapak sabitlenmiştir. Panjur çapı 35...50 mm'dir, merkezi montaj deliğinin çapı, milin çapına eşittir. Pano, mil ile birlikte dönen kapak her iki IR ışınını da engelleyecek şekilde makineye sabitlenmiştir.
Perdede tamamlanmamış bir sektör şeklinde bir kesik kesilir. Çentiğin açısal genişliği ve derinliği, şaft döndüğünde, kapak, şematik olarak gösterildiği gibi, önce yalnızca bir kanaldan, sonra her ikisinden ve son olarak yalnızca diğerinden kısa süreli bir IR radyasyon geçişi sağlayacak şekilde olmalıdır. Şek. 2. Şu veya bu konumda açık olan kanallar renkli olarak gösterilir. Sensörden gelen bu sinyal dizisi, mikrodenetleyiciye makinenin çalışma milinin dönüş yönünü belirleme yeteneği verir.
.
Sayaç, üç adet AA (R6) galvanik pilden oluşan bir pille çalışır, ancak 5 V'luk stabilize çıkış voltajına sahip herhangi bir ağ ünitesini kullanabilirsiniz.
Sensör, 1 mm kalınlığında folyo cam elyafından yapılmış bir baskılı devre kartı üzerine monte edilmiştir. Tahtanın çizimi Şek. 3. Akım sınırlayıcı direnç R3 baskılı iletkenlerin yanında lehimlenmiştir ve yayan diyotlar ve fototransistörler diğer taraftadır.
Parçaların geri kalanı (GB1 pili ve SA1 anahtarı hariç), aynı cam elyafından yapılmış ikinci kart üzerine yerleştirilmiştir. Çizimi Şekil l'de gösterilmiştir. 4. Sıva üstü baskı tarafından tüm dirençler (R3 hariç) üzerine yerleştirilmiş olup, karşı tarafta mikrodenetleyici, dijital gösterge, kondansatörler, diyot, SB1 butonu ve tel jumperlar bulunmaktadır. Mikrodenetleyici, karta lehimlenmiş bir panele kurulur.
Sensör kartı ana karta 1,2 mm çapında kalaylı bakır telden bükülerek kenarları baskılı iletkenlere lehimlenen iki braket ile ana karta sabitlenir. Levhaları makine gövdesine sabitlemek için, aynı telden yapılmış ve ayrıca ana karta lehimlenmiş, vida gözü olan ev yapımı tutucular kullanıldı.

Pirinç. 4

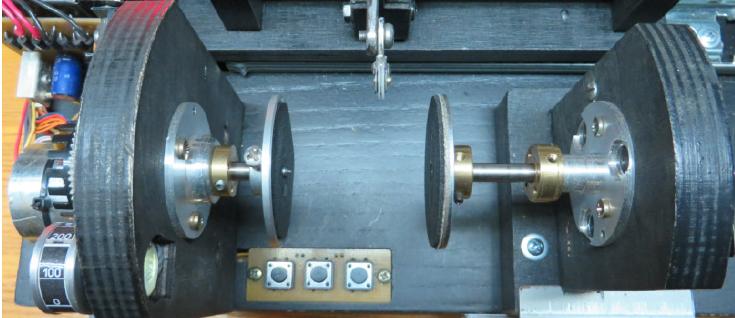
Sarma makinesine takılan sayacın yapıcı varyantlarından birinin genel görünümü, Şekil 2'deki fotoğrafta gösterilmektedir. 5. Makinenin arkasına şalterli bir galvanik pil takılmıştır.
Sensör için, şemada belirtilenlere ek olarak, yayan diyotları SEP8706-003, SEP8506-003, KM-4457F3C, AL144A, AL108AM ve diğerlerini ve fototransistörleri - SDP8436-003, KTF102A kullanabilirsiniz. Eski top bilgisayar farelerinden optokuplörler de çok uygundur; yayan diyotlar için kısa terminal katottur ve fototransistörler için yayıcıdır.
Fototransistörleri opak (siyah) bir durumda kullanmanın daha iyi olduğuna dikkat edilmelidir - bu durumda, fotodetektörler üzerindeki harici parlak kaynaklardan gelen ışık girişimi nedeniyle hesaplamada arıza ve hata olasılığı minimum olacaktır. Mevcut fototransistörler şeffafsa, her birinin üzerine merceğin karşısında bir delik bulunan bir parça siyah PVC tüp koyun ve tüm sensörü siyah bir kağıt kaplama ile yabancı ışıktan kapatın. Perde yansıtıcı malzemeden yapılmışsa siyah mat boya ile kaplanması tavsiye edilir.
"Yüzey" dirençler yerine 0,062 W gücünde MLT-0,125 veya C2-23 kullanabilirsiniz. Düğme SB1 - herhangi biri, panodaki bağlantı yeri için uygundur. E40281-L-O-0-W yerine FYQ-2841CLR dijital gösterge iş görecektir.

Mikrodenetleyici programı Proteus ortamında geliştirildi ve hata ayıklandı, ardından ICProg programlayıcı kullanılarak mikrodenetleyiciye yüklendi. Mikrodenetleyici panoya takıldıktan sonra, sayacın ilk ve sonraki açılışında gösterge tüm tanıdık alanlarda eksi işareti gösterecektir. Yaklaşık iki saniye sonra ekranda sıfırlar görünecektir - bu, sayacın çalışmaya hazır olduğunun bir işaretidir.
Program, hatalı bilgi alması ve mikrodenetleyicinin "donması" durumunda acil durum belleği sıfırlama işlevi sağlar (bu çok nadiren olur, ancak olabilir). Mikrodenetleyiciyi çalışma moduna döndürmek için sayaca giden gücü kapatmanız, "Sıfırla" düğmesine basmanız ve bırakmadan gücü açmanız gerekir. Puan tablosu sıfırları gösterir göstermez çalışmaya devam edebilirsiniz, ancak önceki dönüş sayısı hakkındaki bilgiler elbette kaybolacaktır.
Düzgün monte edilmiş bir cihazın ayarlanmasına gerek yoktur.
Sarma makinesi için sarma sayacı
Bir gün transformatörleri elle sarmaktan bıktınız ve şimdi bir sarma makinesinin yapımı için eski kabinin tahtalarını çarpık bir şekilde kesiyorsunuz. Bu makineler farklıdır: manuel tahrikli veya elektrikli tahrikli, bobin istifleyicili veya bobinsiz. Ancak hepsinin ortak bir noktası var: bir bobin sayacına duyulan ihtiyaç. Bu harika ekleme, ağ sargıları gibi çok turlu sargıları - 1000 dönüşün altında veya birincil çıkış transformatörleri - 3000'in altında - rahatça sarmanıza izin verecektir. İyi bir sayaç her iki yönde de sayabilmelidir: eğer döner, bunları hesaplanan miktarlardan çıkarmalıdır. Ve her gün biraz sarmaya karar verirseniz, o zaman ne kadar yaraladığınızı hatırlamanız gerekir, böylece daha sonra aynı yerden devam edebilirsiniz. Ve elbette, tüm tasarım en erişilebilir kısımlarda en basit olmalıdır.
Çabuk bir tane bulduğumuzu mu düşünüyorsun? Bu doğru, hayır. Tabii ki, her şeyi atmega üzerinde iki satırlı LCD ekranlarla yaptılar, ancak bu bir araç bilgisayarı değil! Ek olarak, bazı bobin sayaçları geriye doğru saymayı bilmezler.
Ve sonunda istenilen tasarım bulundu! Yazarın açıklamasını içeren sayfa Vladimir tarafından icat edildi ve uygulandı:

Sayaç, ortak bir PIC16F628A mikrodenetleyici üzerine inşa edilmiştir. Dönüş sayısının dört biti, yedi bölümlü bir gösterge ile görüntülenir. Böylece çıkış trafolarını sararken önemli olan 9999 dönüşe kadar sarmak mümkündür. İki düğme vardır: sıfırla ve ezberle. Sensör olarak iki saz anahtarı kullanılır. Makinenin miline bir mıknatıs takmanız yeterlidir.

Yazarın versiyonunda, bazı bilinmeyen pinlerin ortak katoduna sahip bir gösterge kullanılır. Daha geniş bir gösterge için kartı ve ortak anodlu bir gösterge için aygıt yazılımını yeniden yapmak zorunda kaldık. Ancak yazarın versiyonu simülatörde test edildi, iyi çalışıyor.
Bu sayacın bir özelliği vardır: beş saniyede en az bir küçük indükleme anahtarı durum değişikliği hızında sayar. Bu nedenle, yavaş ve dikkatli bir şekilde bir şeyi sararsanız, bu dönüşü saymama şansı vardır. Ancak bunun olasılığı küçüktür, bu yüzden kullanabilirsiniz.
Muhtemelen tasarım, herhangi birinin ihtiyacı varsa kamış anahtarlardan optiğe ve hatta mekanik kontaklara yeniden yapılabilir - sıçrama yazılım tarafından bastırılır.