Электронный счетчик витков. Запоминающий реверсивный счётчик витков - Готовые устройства - Каталог статей - Микроконтроллеры - это просто! Необходимые материалы и комплектация для изготовления
Ознакомившись с рядом опубликованных в журнале конструкций счётчиков различного назначения (например, ), я принял решение разработать свой вариант счётчика витков, в котором использована энергонезависимая память микроконтроллера. В результате удалось создать простой и удобный в работе счётчик витков для намоточного станка, не содержащий дефицитных деталей.
Рис. 1
Счётчик состоит из нескольких узлов (рис. 1
). Основой конструкции служит микроконтроллер DD1, к которому через токоограничительные резисторы R10-R16 подключён четырёхразрядный светодиодный индикатор HG1. Две оптопары - излучающий ИК диод- фототранзистор (VD2VT1, VD3VT2), - образующие датчик числа оборотов рабочего вала станка, формируют импульсы низкого уровня, по которым микроконтроллер определяет направление вращения и число оборотов вала. Предусмотрена кнопка SB1 для обнуления памяти, а также вспомогательные цепи: R2C2, работающая в составе встроенного тактирующего генератора микроконтроллера, VD1C1, сохраняющая напряжение питания, необходимое для перехода микроконтроллера в режим SLEEP, и R6R8, следящая за напряжением питания счётчика.
Известно, что микроконтроллеры семейства PIC довольно капризны при работе с EEPROM (особенно, когда запись в неё происходит автоматически). Уменьшение напряжения питания может исказить содержимое памяти При работе счётчика линия RB1 (вывод 7) микроконтроллера, к которой подключена цепь R6R8, опрашивается на наличие напряжения питания, и если оно пропадает, то благодаря цепи VD1C1 микроконтроллер успевает перейти в спящий режим, тем самым блокируя дальнейшее выполнение программы и защищая информацию в EEPROM. В процессе счёта микроконтроллер будет сохранять в памяти числа после каждого оборота рабочего вала станка. При каждом очередном включении питания индикатор HG1 отобразит то число, что было до отключения.
Датчик представляет собой небольшую печатную плату (22×22 мм), на которой смонтированы два излучающих диода и два фототранзистора, установленных так, что образуют два оптических канала передатчик-приемник. Оптические оси каналов параллельны, межосевое расстояние - около 10 мм.
На рабочем валу станка неподвижно закреплена шторка в виде диска из жёсткого непрозрачного для ИК лучей материала (текстолит, гетинакс, металл, пластик) толщиной 1…2 мм. Диаметр шторки - 35…50 мм, диаметр центрального установочного отверстия равен диаметру вала. Плату на станке фиксируют так, чтобы шторка, вращаясь вместе с валом, могла перекрывать собой оба ИК луча.
В шторке пропиливают вырез в форме неполного сектора. Угловая ширина и глубина выреза должны быть такими, чтобы при вращении вала шторка обеспечивала кратковременное прохождение ИК излучения сначала только через один канал, затем через оба и, наконец, только через другой, как это схематически проиллюстрировано на рис. 2
. Цветом показаны каналы, открытые в той или иной позиции. Такой порядок следования сигналов с датчика даёт микроконтроллеру возможность определять направление вращения рабочего вала станка.

Счётчик рассчитан на питание от батареи из трёх гальванических элементов АА (R6), но можно использовать любой сетевой блок со стабилизированным выходным напряжением 5 В.
Вместо «поверхностных» резисторов можно использовать МЛТ-0,125 или С2-23 мощностью 0,062 Вт. Кнопка SB1 - любая, подходящая по месту крепления на плате. Вместо E40281-L-O-0-W подойдёт цифровой индикатор FYQ-2841CLR.
Программа микроконтроллера разработана и отлажена в среде Proteus, после чего с помощью программатора ICProg загружена в микроконтроллер. После установки микроконтроллера в панель при первом и последующих включениях счётчика индикатор отобразит знак «минус» во всех знакоместах. Примерно через две секунды на табло появятся нули - это признак готовности счётчика к работе.
В программе предусмотрена функция аварийного обнуления памяти на тот случай, когда в неё попадёт ошибочная информация и микроконтроллер «зависает» (такое бывает крайне редко, но быть может). Для возвращения микроконтроллера в рабочий режим нужно выключить питание счётчика, нажать на кнопку «Обнуление» и, не отпуская её, включить питание. Как только табло отобразит нули, можно продолжать работать, но информация о прежнем числе витков будет, разумеется, утрачена.
В налаживании правильно собранное устройство не нуждается.
ЛИТЕРАТУРА
1. Долгий А. Усовершенствованный реверсивный счётчик. - Радио, 2005, №11, с. 28, 29.
2. Гасанов А., Гасанов Р. Электронный счётчик. - Радио. 2006, № 11, с. 35, 36.
А. БАНКОВ, г. Орёл (Радио, №8 2011г)
Случилось так, что припекло мне трансформатор мотать, всё бы хорошо, да станка только не хватает - от тут и началось! Поиск по интернетам дал некоторые возможные варианты построения, но смущало меня то, что подсчёт витков производится опять же механическим счётчиком, добытым из спидометра или старого магнитофона, либо геркон + калькулятор. Хм…
На механику, в плане счётчика, у меня не стояло абсолютно, спидометров на разборку у меня нет, лишних калькуляторов тоже. Да и как сказал тов. Serega
с другого ресурса: «Хорошие электронщики, зачастую - плохие механики!». Может я и не лучший электронщик – но механик уж точно паршивый.
Посему решил я сварганить электронный счётчик, а всю механическую часть устройства поручить на разработку семейству (благо отец и брат у меня как раз таки асы по части механики).
Прикинув одно место к другому, решил, что 4 разрядов индикаторов мне хватит с головой – это ж не много – не мало, а 10 000 витков. Управлять всем безобразием будет контроллер, вот только любимые ATtiny2313 и ATmega8 мне показалось совершенно не комильфо пихать в такое плевое устройство, задача простая и решать её нужно просто. Поэтому будем пользовать ATtiny13 – наверное, самый «дохлый» МК из тех, что есть в продаже на сегодняшний момент (я не беру PIC-и или MCS-51 – эти я только запрограммировать смогу, а вот программы для них писать не умею). Ног у этой тиньки маловато, ну дык никто не мешает нам сдвиговые регистры к ней прикрутить! В качестве датчика оборотов решил использовать датчик холла.
Набросал схему:
и собрал на макетке:

О кнопках сразу не сказал – а куда ж без них! Целых 4 штуки помимо ресета (S1).
S2 – включает режим намотки (режим установлен по умолчанию) – с каждым оборотом оси с катушкой будет увеличивать значение количества витков на 1
S3 – режим смотки, соответственно, с каждым оборотом, будет уменьшать значение на 1. Максимально смотать можно до «0» - в минус сматываться не будет:)
S4 – чтение сохраненной в EEPROM информации.
S5 – запись в EEPROM текущего значения + режим.
Естественно нужно не забывать нажать на кнопку смотки если собираемся сматывать витки, иначе они будут приплюсовываться. Можно было повесить вместо 1 датчика холла – 3 штуки или валкодер и изменить программу контроллера таким образом чтоб он сам выбирал направление вращения, но думаю в данном случае это лишнее.
Теперь не много по схеме:
Как видим, ничего сверхъестественного в ней нет. Питается всё это безобразие от 5В., ток потребляет что-то в районе 85мА.
Исключён фрагмент. Наш журнал существует на пожертвования читателей. Полный вариант этой статьи доступен только
Кнопки S2-S4 – а-ля матричная клавиатура. «Выходы» кнопок висят на тех же проводниках что и входы регистров, дело в том что после пересылки данных из контроллера в регистры на входах SHcp и Ds может быть сигнал любого уровня, и на содержимое регистров это никак не повлияет. «Входы» кнопок висят на выходах регистров, передача информации происходит примерно следующим образом: сначала контроллер отправляет информацию на регистры для последующей пересылки на индикаторы, затем отправляет информацию для сканирования кнопок. Резисторы R14-R15 необходимы для предотвращения «драки» между ногами регистров/контроллера. Пересылка инфы на индикацию и на сканирование клавы происходит на большой частоте (внутренний генератор в тини13 настроен на 9,6МГц), соответственно как быстро мы не пытались бы нажать и отпустить кнопку, за время нажатия произойдет много срабатываний и соответственно нолик с кнопки побежит на встречу единичке с контроллера. Ну и такая неприятная вещь как дребезг контактов кнопок опять же.
Резисторами R16-R17 подтягиваем нашу клавиатуру к + питания, чтоб во время простоя с выходов клавиатуры на входы контроллера приходила единичка а не Z состояние влекущее ложные срабатывания. Можно было обойтись и без этих резисторов, внутренних pull-up резисторов в МК вполне достаточно, ну да рука у меня не поднялась их убрать – береженного бог бережет.
По схеме вроде бы и все, для заинтересовавшихся привожу список компонентов. Сразу оговорюсь, что номиналы могут отличаться в ту или иную сторону.
Исключён фрагмент. Наш журнал существует на пожертвования читателей. Полный вариант этой статьи доступен только
После проверки работы счётчика на макете, настала пора собрать железку в «законченное устройство». Развел плату, вытравил, запаял детальки и получил следующее:


В законченом варианте кнопка сброса отсутствует - ну некуда мне ее было на плате втыкать, итак места мало, а если зависнет МК, значит обесточу и заново включу. Так же появился диод в цепи питания - защита от переполюсовки. Что касается остальных деталек – то использовал только те, что были под рукой, поэтому тут и SMD и обычные корпуса.
Вот вроде и все, в конце статьи архив со схемой/печаткой прошивкой.
Кстати насчёт прошивки, на плате не предусмотрен разъём для программирования в целях экономии места. Прошивал по SPI протоколу примерно так:

пробовал программаторы, HVProg, AVR910 и USBAsp – все прошили контроллер без проблем. После прошивки имеет смысл нажать кнопку записи, чтоб записать в EEPROM начальные значения. Если этого не сделать, а нажать клавишу чтения то на индикаторах можем увидеть все что угодно - кто знает что там в памяти было раньше?
Конечный результат:
На неподвижной части станка крепим датчик, на ось вращения устаналиваем магнит таким образом, чтоб он при вращении проходил в 3-5 мм от датчика. Ну и пользуемся:)
Теперь точно всё, всем спасибо за внимание, а товарищам GP1
и avreal
за помощь в разработке, ждем критику:)
Файлы
Схема, печатка, прошивка:▼ 🕗 10/02/10 ⚖️ 128,55 Kb ⇣ 354 Здравствуй, читатель! Меня зовут Игорь, мне 45, я сибиряк и заядлый электронщик-любитель. Я придумал, создал и содержу этот замечательный сайт с 2006 года.
Уже более 10 лет наш журнал существует только на мои средства.
Хорош! Халява кончилась. Хочешь файлы и полезные статьи - помоги мне!
--
Спасибо за внимание!
Игорь Котов,
главный редактор журнала «Датагор»
Исходники прошивки:
▼
🕗 04/03/10 ⚖️ 3,62 Kb ⇣ 254
В радиолюбительской практике, часто возникает необходимость намотать/перемотать различные обмотки трансформаторов, дросселей, реле и др. .
При разработке данного станка, ставились следующие задачи:
1. Малые габариты.
2. Плавный старт шпинделя.
3. Счётчик до 10000 витков (9999).
4. Намотка с автоматической укладкой провода. Шаг укладки (диаметр провода) 0.02 - 0.4мм.
5. Возможность намотки секционных обмоток без перенастройки.
6. Возможность закрепления и намотки каркасов без центрального отверстия.
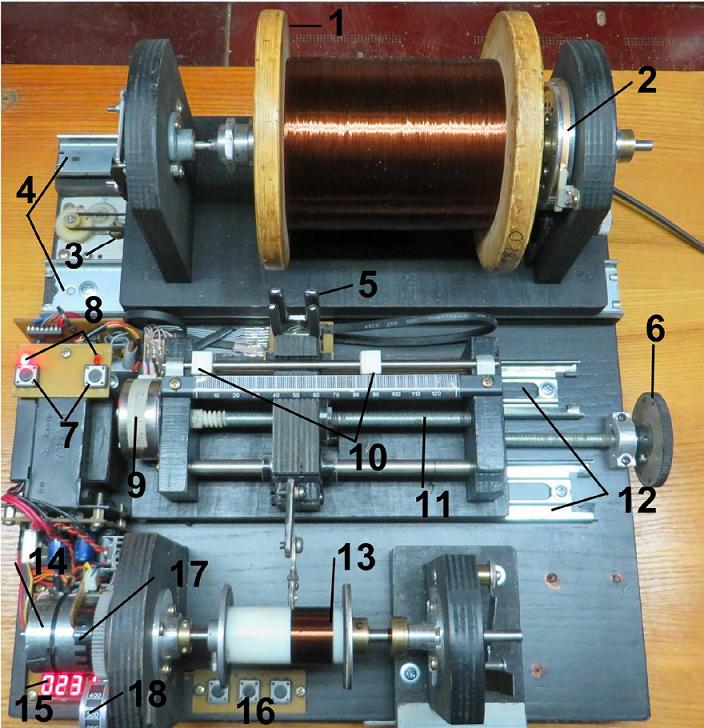
Рисунок 1.
Внешний вид намоточного станка.
Состав намоточного станка.
1. Подающая бобина (катушка с проводом).
2. Притормаживание (тормозной механизм).
3. Шаговый двигатель центровки бобины.
4. Шариковые мебельные направляющие.
5. Шторка оптических датчиков механизма центровки бобины.
6. Ручка перемещения позиционера на другую секцию при намотке секционных обмоток.
7. Кнопки ручного переключения направления укладки.
8. Светодиоды направления укладки.
9. Шаговый двигатель позиционера.
10. Шторки оптических датчиков границы намотки.
11. Винт позиционера.
12. Шариковые мебельные направляющие.
13. Наматываемая катушка.
14. Двигатель намотки.
15. Счётчик витков.
16. Кнопки настройки.
17. Оптический датчик синхронизации.
18. Регулятор скорости.
Устройство и принцип действия.
Подающий узел.
Подающий узел предназначен для закрепления на нём бобины с проводом, различных величин, и обеспечения натяжения провода.
В него входит механизм крепления бобин и механизм подтормаживания вала.

Рисунок 2.
Подающий узел.
Подтормаживание.
Без подтормаживания подающей бобины, намотка провода на каркасах будет рыхлая и качественной намотки не получится. Войлочная лента «2», тормозит барабан «1». Поворот рычага «3», натягивает пружину «4» - регулировка силы торможения. Для разной толщины провода, настраивается своё притормаживание. Здесь используются готовые детали видеомагнитофона.

Рисунок 3.
Подтормаживающий механизм.
Центровка бобины.
Малые габариты станка и расположение в непосредственной близости, наматываемой катушки и подающей бобины с проводом, потребовали ввести дополнительный механизм центровки подающей бобины.


Рисунок 4, 5.
Центрирующий механизм.
При намотке катушки, провод с бобины воздействует на шторку «5», выполненной виде “вилки” и шаговый двигатель «3», через редуктор с делением 6 и зубчатый ремень, по роликовым направляющим «4», автоматически сдвигает бобину в нужном направлении.
Таким образом, провод всегда находится по центру см. рис 4, рис 5:

Рисунок 6.
Датчики, вид сзади.
Состав и устройство датчиков.
19. Оптические датчики механизма центровки бобины.
5. Шторка перекрывающая датчики механизма центровки бобины.
20. Шторки перекрывающие датчики переключения направления позиционера.
21. Оптические датчики переключения направления позиционера.
Позиционер.
Шторками «20» рис. 6 - выставляется граница намотки. Шаговый двигатель, перемещает механизм укладчика, пока шторка не перекроет один из датчиков «21» рис. 6, после чего меняется направление укладки.
В любой момент можно изменить направление укладки кнопками «1» рис. 7.

Рисунок 7.
Укладчик.
Скорость вращения шагового двигателя «9» рис. 7, синхронизирована с помощью датчика «10», «11» рис 8, с вращением наматываемой катушки и зависит от диаметра провода установленного в меню. Диаметр провода, может быть выставлен 0.02 - 0.4мм. С помощью ручки «8» рис. 7, можно передвинуть весь позиционер в сторону, не изменяя границы намотки. Таким образом, можно намотать другую секцию в многосекционных каркасах.

Рисунок 8.
Оптодатчик.
Состав позиционера и оптодатчика (рис. 7-8).
1. Кнопки ручного переключения направления укладки.
2. Светодиоды направления укладки.
3. Шторки перекрывающие датчики переключения направления позиционера.
4. Линейный подшипник.
5. Капролоновая гайка.
6. Ведущий винт. Диаметр 8мм, шаг резьбы 1,25мм.
7. Шариковые мебельные направляющие.
8. Ручка перемещения позиционера на другую секцию при намотке секционных обмоток.
9. Шаговый двигатель.
10. Оптический датчик синхронизации.
11. Диск, перекрывающий датчик синхронизации. 18 прорезей.
Приёмный узел.

Рисунок 9.
Приёмный узел.


Рисунок 10, 11.
Приёмный узел.
1. Счётчик витков.
2. Коллекторный высокоскоростной двигатель.
3. Шестерня редуктора.
4. Кнопка «сброс счётчика».
5. Регулировка скорости.
6. Включатель «Старт намотки».
7. Крепёж наматываемой катушки.
Вращение наматываемой катушки, производит коллекторный высокооборотный двигатель через редуктор.
Редуктор состоит из трёх шестерён с общим делением 18. Это обеспечивает необходимый вращающий момент на малых оборотах.
Регулировка скорости двигателя, производится изменением питающего напряжения.


Рисунок 12, 13.
Крепление каркаса имеющего отверстие.
Конструкция приёмного узла позволяет закреплять, как каркасы имеющие центральное отверстие, так и каркасы, таких отверстий не имеющие, что хорошо видно на рисунках.
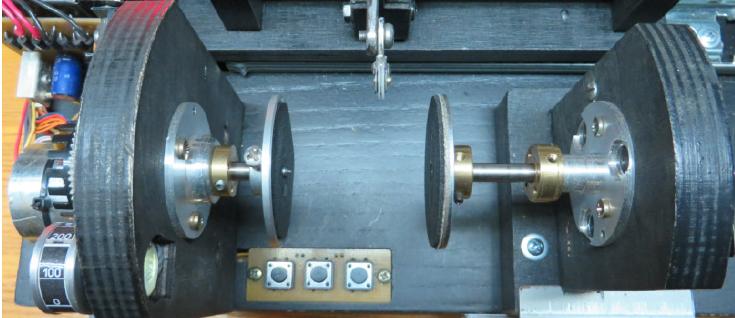

Рисунок 14, 15.
Крепление каркаса не имеющего отверстие.
Электрическая схема.

Рисунок 16.
Электрическая схема намоточного станка.
Всеми процессами станка, управляет микроконтроллер PIC16F877.
Индикация количества витков и диаметра провода, отображается на светодиодном четырёх знаковом индикаторе. При нажатой кнопке «D», отображается диаметр провода, при отжатой количество витков.
Для изменения диаметра провода, нажать кнопку «D» и кнопками «+», «-» изменить значение. Установленное значение автоматически сохраняется в EEPROM. Кнопка «Zerro» - обнуление счётчика. Разъём «ISCP» служит для программирования микроконтроллера.
P.S. Чертежей механической части не существует, потому что устройство изготовлялось в одном экземпляре, и конструкция формировалась в процессе сборки.
В данной конструкции были использованы имеющиеся в разборке элементы и узлы (не имеющие маркировки) от видеомагнитофонов и принтеров.
Ни в коем случае я не настаиваю в точном повторении данной конструкции, а лишь как в использовании каких-либо узлов от неё в своих конструкциях.
Повторение данного устройства возможно опытными радиолюбителями, имеющие навыки работы с механикой и способными изменить конструкцию под свои, имеющиеся механические части.
Механическая часть соответственно, может быть реализована по другому.
Редукторы на двигателях, могут быть и с другим делением.
Критические элементы:
Чтобы программа работала правильно, необходимо соблюсти ряд условий, а именно;
Оптический датчик «17» рис 1. , может быть другой конструкции, но обязательно на 18 отверстий.
Винт позиционера, обязательно с шагом 1,25мм - это стандартный шаг для винта диаметром 8мм.
Шаговый двигатель позиционера 48 шагов/оборот, 7.5 градусов/шаг - это самые распространённые двигатели в оргтехнике.
Демонстрационный ролик работы станка:
Ниже в прикреплении (в архиве) собраны все необходимые файлы и материалы для сборки намоточного станка.
Если по сборке и наладке у кого-то возникнут какие либо вопросы, то задавайте их на форуме. По возможности постараюсь ответить и помочь.
Желаю всем удачи в творчестве и всего наилучшего!
Архив "Намоточный станок"."
Ознакомившись с рядом опубликованных в журнале конструкций счётчиков различного назначения (например, ), я принял решение разработать свой вариант счётчика витков, в котором использована энергонезависимая память микроконтроллера. В результате удалось создать простой и удобный в работе счётчик витков для намоточного станка, не содержащий дефицитных деталей.
Он способен считать от 0 до 9999 оборотов вала, после чего показания индикатора обнуляются и счёт начинается заново. При вращении вала в обратную сторону индикатор уменьшает показания на единицу на каждый оборот.
Рис. 1
Счётчик состоит из нескольких узлов (рис. 1). Основой конструкции служит микроконтроллер DD1, к которому через токоограничительные резисторы R10—R16 подключён четырёхразрядный светодиодный индикатор HG1. Две оптопары — излучающий ИК диод— фототранзистор (VD2VT1, VD3VT2), — образующие датчик числа оборотов рабочего вала станка, формируют импульсы низкого уровня, по которым микроконтроллер определяет направление вращения и число оборотов вала. Предусмотрена кнопка SB1 для обнуления памяти, а также вспомогательные цепи: R2C2, работающая в составе встроенного тактирующего генератора микроконтроллера, VD1C1, сохраняющая напряжение питания, необходимое для перехода микроконтроллера в режим SLEEP, и R6R8, следящая за напряжением питания счётчика.

Известно, что микроконтроллеры семейства PIC довольно капризны при работе с EEPROM (особенно, когда запись в неё происходит автоматически). Уменьшение напряжения питания может исказить содержимое памяти При работе счётчика линия RB1 (вывод 7) микроконтроллера, к которой подключена цепь R6R8, опрашивается на наличие напряжения питания, и если оно пропадает, то благодаря цепи VD1C1 микроконтроллер успевает перейти в спящий режим, тем самым блокируя дальнейшее выполнение программы и защищая информацию в EEPROM. В процессе счёта микроконтроллер будет сохранять в памяти числа после каждого оборота рабочего вала станка. При каждом очередном включении питания индикатор HG1 отобразит то число, что было до отключения.
Датчик представляет собой небольшую печатную плату (22x22 мм), на которой смонтированы два излучающих диода и два фототранзистора, установленных так, что образуют два оптических канала передатчик—приемник. Оптические оси каналов параллельны, межосевое расстояние — около 10 мм.
На рабочем валу станка неподвижно закреплена шторка в виде диска из жёсткого непрозрачного для ИК лучей материала (текстолит, гетинакс, металл, пластик) толщиной 1...2 мм. Диаметр шторки — 35...50 мм, диаметр центрального установочного отверстия равен диаметру вала. Плату на станке фиксируют так, чтобы шторка, вращаясь вместе с валом, могла перекрывать собой оба ИК луча.
В шторке пропиливают вырез в форме неполного сектора. Угловая ширина и глубина выреза должны быть такими, чтобы при вращении вала шторка обеспечивала кратковременное прохождение ИК излучения сначала только через один канал, затем через оба и, наконец, только через другой, как это схематически проиллюстрировано на рис. 2. Цветом показаны каналы, открытые в той или иной позиции. Такой порядок следования сигналов с датчика даёт микроконтроллеру возможность определять направление вращения рабочего вала станка
.
Счётчик рассчитан на питание от батареи из трёх гальванических элементов АА (R6), но можно использовать любой сетевой блок со стабилизированным выходным напряжением 5 В.
Датчик смонтирован на печатной плате из фольгированного стеклотекстолита толщиной 1 мм. Чертёж платы показан на рис. 3. Токоограничива-ющий резистор R3 припаян со стороны печатных проводников а излучающие диоды и фототранзисторы — с другой.
Остальные детали (кроме батареи GB1 и выключателя SA1) размещены на второй плате, изготовленной из такого же стеклотекстолита. Её чертёж представлен нарис. 4. Все резисторы (кроме R3) на ней размещены со стороны печати поверхностным монтажом, а микроконтроллер, цифровой индикатор, конденсаторы, диод, кнопка SB1 и проволочные перемычки — с противоположной стороны. Микроконтроллер установлен в панель, впаянную в плату.
Плата датчика скреплена с основной двумя скобами, согнутыми из медной лужёной проволоки диаметром 1,2 мм и припаянными к краевым печатным проводникам плат. Для крепления плат к корпусу станка использованы самодельные держатели с ушком для винта, изготовленные из такой же проволоки и также припаянные к основной плате.

Рис. 4

Общий вид одного из конструктивных вариантов счётчика, установленного на намоточном станке, показан на фото рис. 5. Батарея гальванических элементов с выключателем прикреплены к станку сзади.
Для датчика, кроме указанных на схеме, можно использовать излучающие диоды SEP8706-003, SEP8506-003, KM-4457F3C, АЛ144А, АЛ108АМ и другие, а фототранзисторы — SDP8436-003, КТФ102А. Очень хорошо подходят также оптопары от старых шариковых компьютерных манипуляторов — мышей; у излучающих диодов короткий вывод—катод, а у фототранзисторов — эмиттер.
Следует заметить, что лучше использовать фототранзисторы в непрозрачном (чёрном) корпусе — в этом случае вероятность сбоев и ошибок в счёте из-за попадания на фотоприемники световых помех от внешних ярких источников будет минимальна. Если же фототранзисторы, имеющиеся в наличии, прозрачные, на каждый из них следует на деть отрезок чёрной ПВХ трубки с отверстием напротив линзы, а весь датчик закрыть от постороннего света накладкой из чёрной бумаги. Если шторка изготовлена из отражающего свет материала, её рекомендуется покрыть чёрной матовой краской.
Вместо "поверхностных" резисторов можно использовать МЛТ-0,125 или С2-23 мощностью 0,062 Вт. Кнопка SB1 — любая, подходящая по месту крепления на плате. Вместо E40281-L-O-0-W подойдёт цифровой индикатор FYQ-2841CLR.

Программа микроконтроллера разработана и отлажена в среде Proteus, после чего с помощью программатора ICProg загружена в микроконтроллер. После установки микроконтроллера в панель при первом и последующих включениях счётчика индикатор отобразит знак "минус" во всех знакоместах. Примерно через две секунды на табло появятся нули — это признак готовности счётчика к работе.
В программе предусмотрена функция аварийного обнуления памяти на тот случай, когда в неё попадёт ошибочная информация и микроконтроллер "зависает" (такое бывает крайне редко, но быть может). Для возвращения микроконтроллера в рабочий режим нужно выключить питание счётчика, нажать на кнопку "Обнуление" и, не отпуская её, включить питание. Как только табло отобразит нули, можно продолжать работать, но информация о прежнем числе витков будет, разумеется, утрачена.
В налаживании правильно собранное устройство не нуждается.
Счётчик витков для намоточного станка
Когда-нибудь мотать трансформаторы вручную надоедает, и вот ты уже криво пилишь досочки бывшего шкафа для постройки намоточного станка. Станки эти бывают разными: с ручным приводом или с электрическим, с укладчиком витков и без. Но все их объединяет одно: необходимость счётчика витков. Это прекрасное дополнение позволит с комфортом наматывать многовитковые обмотки, как то, например, сетевые - под 1000 витков или первички выходных трансформаторов - под 3000. Хороший счётчик должен уметь считать в обоих направлениях: если ты решишь смотать часть витков, он должен вычесть их из подсчитанного количества. А если ты решишь мотать понемногу каждый день, то нужно бы запоминать, сколько уже намотал, чтобы потом продолжить с этого же места. Ну, и, разумеется, вся конструкция должна быть простейшей, на самых доступных деталях.
Как думаешь, быстро ли мы нашли такую? Правильно, нет. Конечно, понаделано всякого на атмегах с двухстрочными ЖК-дисплеями, но это же не бортовой компьютер! К тому же, некоторые счётчики витков просто не умеют считать назад.
И вот, наконец, нужная конструкция была найдена! Её придумал и воплотил Владимир, страница с авторским описанием:

Счётчик построен на распространённом микроконтроллере PIC16F628A. Четыре разряда количества витков отображаются семисегментным индикатором. Таким образом, можно мотать до 9999 витков, что актуально при намотке выходных трансформаторов. Имеются две кнопки: сброс и запоминание. В качестве датчиков используются два геркона. На валу станка необходимо просто прикрепить магнит.

В авторском варианте используется индикатор с общим катодом какой-то неведомой распиновки. Нам пришлось переделать как плату, под более широкий индикатор, так и прошивку, под индикатор с общим анодом. Но авторский вариант был проверен в симуляторе, работает хорошо.
У этого счётчика есть одна особенность: он считает при скорости не менее одного изменения состояния герконов за пять секунд. Поэтому если ты медленно и аккуратно что-то подматываешь, то есть шанс, что он этот виток не посчитает. Но вероятность такого невелика, так что можно пользоваться.
Вероятно, конструкцию можно переделать с герконов на оптику, если кому нужно, или даже на механические контакты - дребезг подавляется программно.





